Deep Q-Network 實戰:基於 TensorFlow 的四層神經網路貪食蛇代理
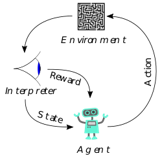
本專案將深度強化學習 (Deep Reinforcement Learning) 應用於經典的貪食蛇遊戲中。為了讓代理 (Agent) 能在動態環境中根據狀態選擇合理動作,我使用 TensorFlow 設計了一個四層全連接神經網路 (4-Layer Fully Connected Network) 作為核心 Q-Network。
透過 11 維環境特徵向量與 Bellman Equation 的 Q 值更新,模型逐步學會避障、靠近食物與延長存活時間。此專案整理了從環境建置、模型架構設計到獎勵函數調整的強化學習實作流程。
🛑 動機與挑戰 (Motivation & Challenge)
在強化學習中,如何設計一個「夠深但不過擬合 (Overfitting)」的網路架構來處理狀態空間,是成功的關鍵。
- 狀態特徵提取: 貪食蛇的決策依賴於相對位置(食物在哪?身旁有無危險?),而非絕對座標。
- 稀疏獎勵 (Sparse Reward): 蛇只有在吃到食物時才有正回饋,其餘時間都在移動。若網路架構過於簡單,難以捕捉「移動」與「未來獎勵」的關聯;若過於複雜,則訓練收斂速度太慢。
🛠️ 技術深度剖析 (Technical Deep Dive)
1. 狀態空間設計 (State Representation)
為了降低輸入維度並加速收斂,我捨棄了原始圖像輸入 (CNN),改採特徵工程方式,將當前局勢濃縮為一個 11 維的布林向量 (Boolean Vector) $S_t$:

- 危險感知 (3): [前方有危險, 右方有危險, 左方有危險]
- 移動方向 (4): [左, 右, 上, 下] (One-hot encoding)
- 食物方位 (4): [食物在左, 食物在右, 食物在上, 食物在下]
2. 模型架構設計 (Model Architecture)
這是本專案的核心。為了捕捉狀態特徵之間的非線性關係(例如:「食物在左」且「左方有危險」$\rightarrow$ 應採取「向上或向下」),我利用 TensorFlow/Keras 建構了一個四層 Dense 網路。
數學表示如下:
$$f(x) = W_4 \cdot \sigma(W_3 \cdot \sigma(W_2 \cdot \sigma(W_1 \cdot x + b_1) + b_2) + b_3) + b_4$$
- Input Layer: 接收 11 維狀態向量。
- Hidden Layer 1 & 2 (Dense): 透過兩層隱藏層(配合 ReLU 激活函數 $\sigma$)進行特徵交叉與提取,增加模型的表達能力,使其能理解複雜的死路結構。
- Output Layer: 輸出 3 個 Q 值,分別對應 [直走, 右轉, 左轉] 的預期獎勵。

3. DQN 演算法與優化 (DQN Algorithm)
利用 TensorFlow 的自動微分能力,我實作了 DQN 的訓練迴圈:
- 預測 (Prediction): 使用
model.predict(state)獲取當前動作的 Q 值。 - 目標 Q 值 (Target Q): 根據 Bellman Equation 計算: $$Q_{target} = R + \gamma \cdot \max(Q_{next_state})$$
- 訓練 (Training): 使用
model.fit()最小化損失函數 (Loss Function),採用均方誤差 (MSE) 來讓預測值逼近目標值。
4. 獎勵塑形 (Reward Shaping)
為了引導蛇更有效率地學習,我設計了細緻的獎勵機制:
- 生存與進食: 吃到食物 $+10$,死亡 $-10$。
- 引導策略: 若動作使蛇頭與食物的距離縮短,給予微小獎勵;若變遠,給予微小懲罰。這解決了初期蛇在原地打轉的問題。
- 時間懲罰: 每一步固定扣除 $-0.1$,迫使模型尋找最短路徑。
📊 成果與反思 (Results & Reflection)
經過多次訓練迭代 (Epochs),觀察到 Agent 的行為進化:
- 隨機階段: 模型尚未收斂,蛇經常撞牆。
- 避障階段: 隱藏層學會了識別「危險特徵」,蛇能長時間存活但在場地繞圈。
- 目標導向: 四層架構能同時利用「食物方位」與「危險感知」特徵,蛇的行為逐漸呈現目標導向。
結論 (Conclusion)
透過 TensorFlow 實作四層 DQN 模型,我理解了狀態設計、網路深度與獎勵函數如何共同影響強化學習的收斂品質。這個專案也讓我熟悉 TensorFlow 模型建構 API 與訓練迴圈的實作細節。