機構合成的最佳化:基於 MATLAB 數值分析的四連桿路徑生成器
本專案探討機構學中的路徑生成 (Path Generation) 問題:設計一組四連桿機構 (4-Bar Linkage),讓連桿曲線 (Coupler Curve) 盡可能貼近空間中指定的 9 個目標點。
📋 專案摘要 (Abstract)
不同於傳統的圖解法或試誤法,本專案採用數值最佳化策略。透過 MATLAB 建立基於向量迴路法 (Vector Loop Equation) 的運動學模型,並利用 fminsearch 演算法針對桿長與起始角度進行多變數迭代求解。在滿足 Grashof 定理 (全迴轉條件) 的前提下,求得一組誤差較低且可運轉的機構尺寸參數。
🛑 問題與挑戰 (The Problem)
在課堂專題中,我們被給予了 9 個固定高度的空間座標點。任務是設計一個四連桿機構,當主動桿旋轉一圈時,其連結桿 (Coupler) 上的特定點軌跡必須盡可能貼合這 9 個點。
這是一個典型的非線性最佳化問題,面臨以下挑戰:
- 多變數耦合: 改變任意一根桿長,整條軌跡的形狀都會劇烈變化。
- 幾何限制: 機構必須能進行 360 度全迴轉 (Crank-Rocker),否則會卡死。
- 數學複雜度: 連桿的非線性位置方程式難以直接求出解析解,必須依賴數值方法。
🛠️ 技術深度剖析 (Technical Deep Dive)
本專案的核心在於將物理機構轉化為數學模型,並定義出讓電腦可以「評分」的目標函數。
1. 數學建模:向量迴路法 (Vector Loop Modeling)
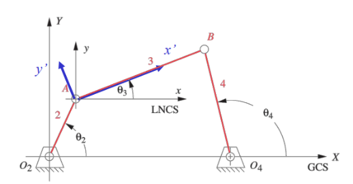
為了計算機構在任意角度下的位置,我使用了複數向量法 (Complex Numbers Method)。如圖所示,將四連桿視為一個閉合的向量迴路:
$$\vec{r_2} + \vec{r_3} = \vec{r_1} + \vec{r_4}$$
利用尤拉公式 ($e^{i\theta} = \cos\theta + i\sin\theta$) 將其展開為實部與虛部:
$$r_2 e^{i\theta_2} + r_3 e^{i\theta_3} - r_4 e^{i\theta_4} - r_1 = 0$$
透過此方程式,對於每一個輸入的主動桿角度 $\theta_2$,我們可以利用幾何關係推導出從動桿角度 $\theta_4$ 與連結桿角度 $\theta_3$,進而計算出軌跡點 $P$ 的精確座標 $(x, y)$。
2. 最佳化策略 (Optimization Strategy)
我選擇 MATLAB 的 fminsearch (基於 Nelder-Mead 單純形法) 作為求解器。
優化變數 (Design Variables): 系統需要調整的參數包含 4 根桿子的長度 ($L_1, L_2, L_3, L_4$) 以及主動桿的起始角度 ($\theta_{start}$)。
目標函數 (Cost Function): 為了定義「最佳」,我採用最小平方法 (Least Squares) 的概念。計算軌跡上對應點與 9 個目標點之間的歐幾里得距離 (Euclidean Distance) 總和:
$$Error = \sum_{i=1}^{9} \sqrt{(x_{target,i} - x_{calc,i})^2 + (y_{target,i} - y_{calc,i})^2}$$
演算法的目標即是找到一組參數,使此 $Error$ 值最小化。
3. 機構限制處理 (Constraint Handling)
並非所有長度組合都能形成可旋轉的機構。為了確保機構能順利運轉一圈而不卡死,必須滿足 Grashof 定理 (Grashof’s Law):
$$S + L \le P + Q$$
(其中 $S$ 為最短桿,$L$ 為最長桿,$P, Q$ 為其餘兩桿)
在程式實作上,我採用了懲罰函數 (Penalty Function) 的技巧:在計算誤差前,先檢查當前參數是否滿足 Grashof 條件。若不滿足(例如機構無法全迴轉),則直接回傳一個極大的誤差值 (如 Infinity),強制 fminsearch 演算法遠離該參數區域,重新尋找可行解。
📊 成果與結論 (Results & Conclusion)
透過數百次迭代,程式收斂出一組可行的桿長參數。將此參數代入繪圖後,連桿曲線能貼近目標的 9 個點,且機構運轉過程未出現明顯死點。
這個專案讓我整理出兩個工程經驗:
- 數學建模能降低試誤成本: 透過尤拉公式與向量法,能將機械動作轉換為可計算的參數。
- 數值方法適合處理非線性限制: 當解析解難以求得時,明確定義目標函數與限制條件,能得到可驗證的近似解。